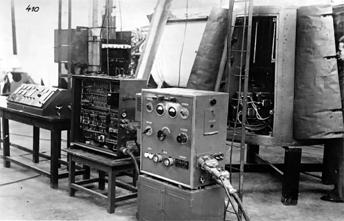
Испытательно-пусковое оборудование стартовой позиции
Система управления ракетой, элементы которой вы видите в представленном альбоме, стала следствием переосмысления советскими инженерами немецкой разработки. В таком виде она появилась не сразу. Сначала была тщательно исследована и полностью воспроизведена оригинальная система управления ФАУ-2. И уже на основе этого опыта советские инженеры приступили к созданию собственной системы управления с применением отечественной элементной базы и материалов.
Ракета имела одноконтурную систему управления — контролировать во время полета можно было только угловое положение оси ракеты и момент выключения двигателей. Наведение осуществлялось по таблицам пуска по цели с заранее известными координатами — задавалось направление пуска и время работы двигателя ракеты.
Сбор информации, необходимой для управления движением, проводился с помощью измерительных устройств, использующих свойство инерции, — гироскопов и акселерометров. Несовершенством этих типов приборов в конце 1940-х обусловлена низкая точность Р-1. Поэтому в середине 1950-х стали применять смешанную радио-инерциальную систему управления ракетами. Одновременно совершенствовались и автономные системы, которые уже к 1960-м годам позволяли самостоятельно получать удовлетворительную точность. Во многом с этим связано создание в 1963 году отдельного НИИ Автоматики и приборостроения под руководством Николая Пилюгина. Что касается радиоуправления, то оно возродилось в 1980-е годы прошлого века в виде глобальных спутниковых навигационных систем.
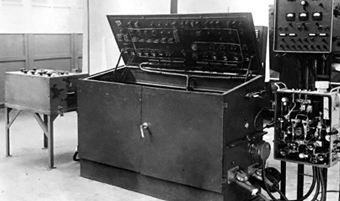
Испытательное оборудование технической позиции
Испытательно-пусковое оборудование стартовой позиции
Система управления ракетой, элементы которой вы видите в представленном альбоме, стала следствием переосмысления советскими инженерами немецкой разработки. В таком виде она появилась не сразу. Сначала была тщательно исследована и полностью воспроизведена оригинальная система управления ФАУ-2. И уже на основе этого опыта советские инженеры приступили к созданию собственной системы управления с применением отечественной элементной базы и материалов.
Ракета имела одноконтурную систему управления — контролировать во время полета можно было только угловое положение оси ракеты и момент выключения двигателей. Наведение осуществлялось по таблицам пуска по цели с заранее известными координатами — задавалось направление пуска и время работы двигателя ракеты.
Испытательное оборудование технической позиции
Сбор информации, необходимой для управления движением, проводился с помощью измерительных устройств, использующих свойство инерции, — гироскопов и акселерометров. Несовершенством этих типов приборов в конце 1940-х обусловлена низкая точность Р-1. Поэтому в середине 1950-х стали применять смешанную радио-инерциальную систему управления ракетами. Одновременно совершенствовались и автономные системы, которые уже к 1960-м годам позволяли самостоятельно получать удовлетворительную точность. Во многом с этим связано создание в 1963 году отдельного НИИ Автоматики и приборостроения под руководством Николая Пилюгина. Что касается радиоуправления, то оно возродилось в 1980-е годы прошлого века в виде глобальных спутниковых навигационных систем.